WHAT IS UHABS-6?UHABS-6 is a balloon satellite system with autonomous recovery capabilities which is design to ensure the recovery of BalloonSat modules in locations surrounded by the ocean, such as the island of Oahu. The success of UHABS-6 will aid the missions of aerospace companies, such as the Hawaii Space Flight Laboratory, by providing a reliable near-space environment to test components, sub-assemblies, instrumentation, software, and procedures. The final design is expected to be finish by December 2018, and to be built, test, and ready to launch by April 2019.
|
Objectives
Primary:
- To develop a reliable, high altitude BalloonSat system capable of carrying small payloads to a near-space environment.
- To develop a recovery system which enables the BalloonSat module to land safely in the ocean or on land.
- To develop a recovery system able to autonomously propel the payload to a designated recovery site if an ocean landing occurs.
- To utilize and test COSMOS as operations and flight software for the Hawaii Space Flight Laboratory (HSFL).
- To obtain images and video during the flight phase.
- To collect atmospheric data and state-of-health data during the flight phase.
CAPABILITIES & KEY FEATURES:
|
BalloonSat Configuration
|
Concept of operations (CONOPs)
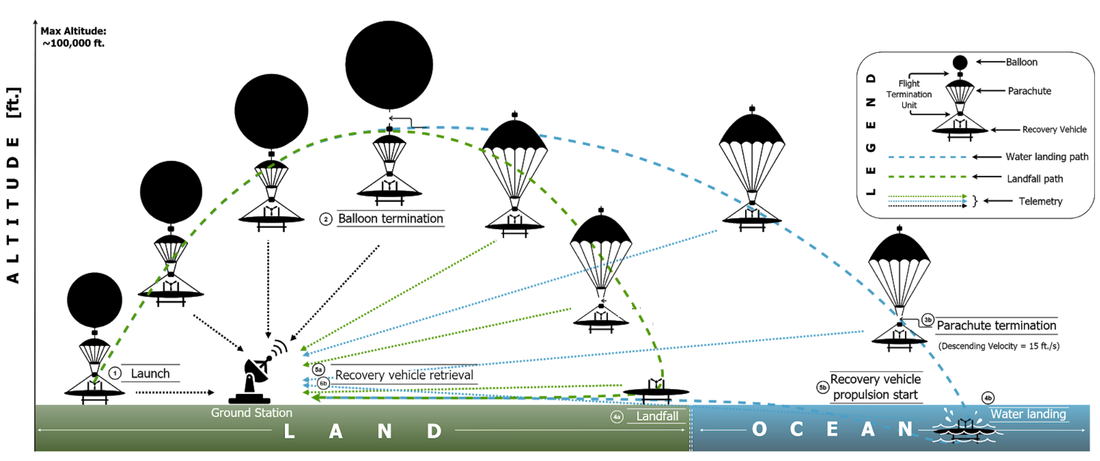
The basic operations UHABS-6 starts launch (1) at zero altitude. During the entire flight phase of the mission, the BalloonSat module will collect and transmit images, atmospheric data, and state-of-health data of the system to the Ground Station, as shown by the telemetry lines. In addition, the BalloonSat module will live-stream video to the Ground Station. At balloon termination (2), the balloon will be released by burst or by command of the payload and/or Ground Station to the flight termination unit (FTU). The BalloonSat module will descend via parachute in which, depending on the location, will either land on the ocean (orange path) or make landfall (blue path). If landfall path occurs, the location beacons will activate and the Ground Station team will track the BalloonSat module for recovery. If ocean landing path occurs, before impact with the ocean, the second FTU shall release the parachute (3) by command of the payload and/or Ground Station. The autonomous propulsion system will activate and propel the BalloonSat module to the designated site for recovery.
Featured Avionics
|
|
Conceptual Design for BalloonSat Module
Our conceptual design for Preliminary Design Review (PDR).
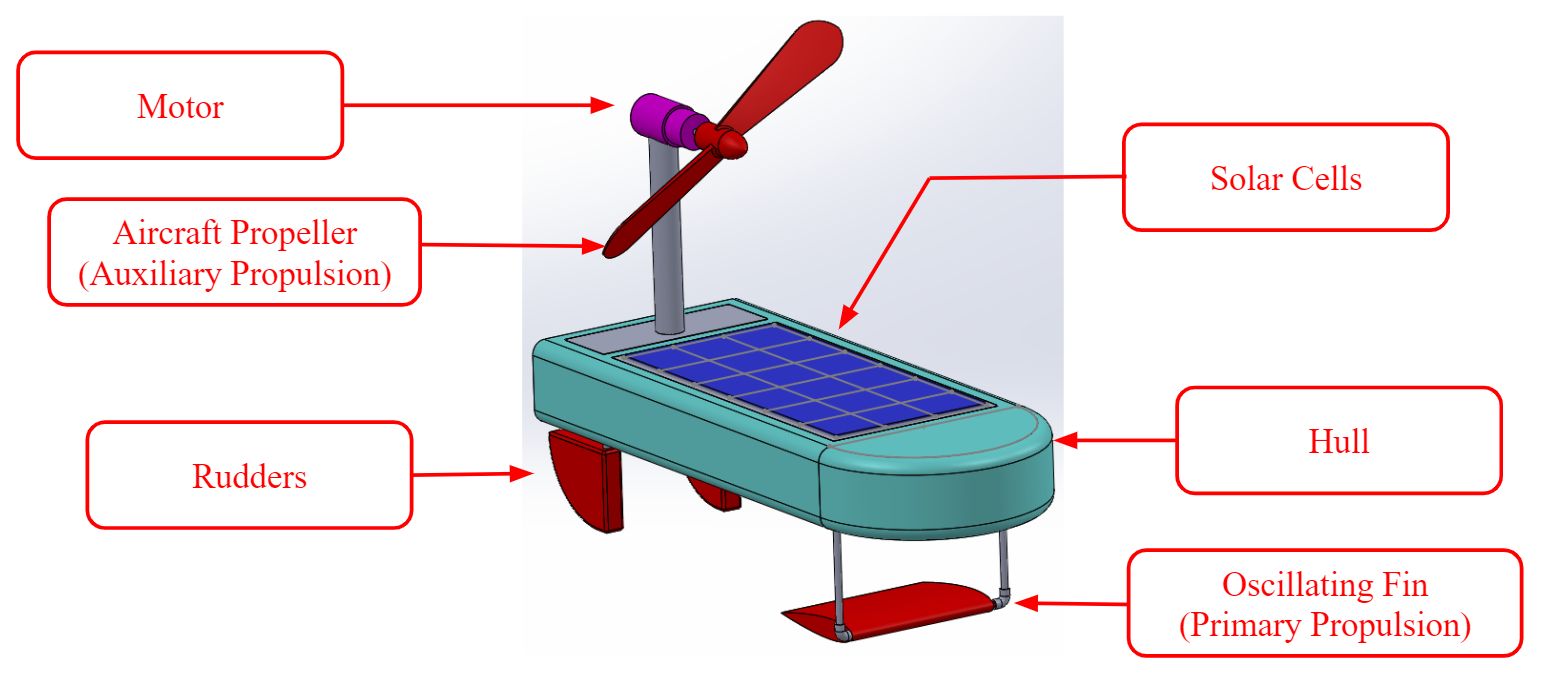
wave power propulsion
The propulsion system relies on waves to convert kinetic energy from ocean wave motion into forward motion. To propel itself forward the autonomous recovery vehicle uses an oscillating fin to convert the up and down motion of ocean waves into forward thrust. The ocean waves cause the hull/structure of the BalloonSat module to pitch up and down with the fin rotating about an joint to always maintain a positive angle of attack with the relative flow. Provided a component of this relative flow is either up or down, a lift force component perpendicular to to the flow, and thus in the forward direction, will always be generated. Additionally, the generated lift force also creates a vertical force component acting against the motion of the wave, which could help to dampen the vehicle’s pitch and roll motions and reduce the system’s probability of capsizing. The oscillating fin is attached perpendicular to the hull/structure of the BalloonSat module by linkage, below and near the bow side of the hull/structure. The oscillating fin does not require power to operate, and allows for the autonomous recovery vehicle to operate for longer periods before reaching a recharge statuses.
Changes since pdr
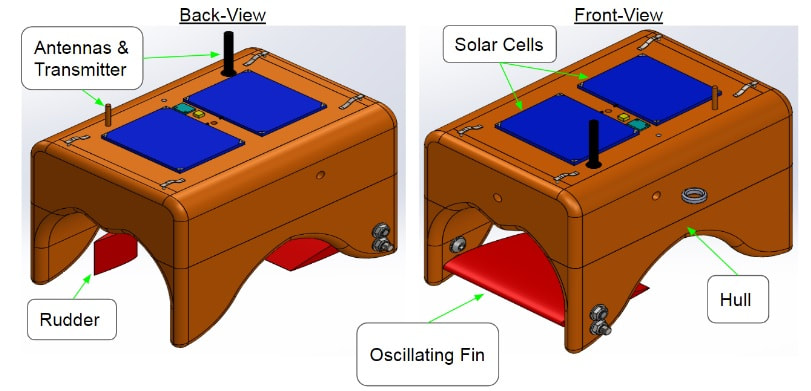
Our current design for Critical Design Review (CDR).
Since the Preliminary Design Review (PDR), the conceptual design of the autonomous recovery vehicle has evolved and changed to better meet the technical, operational, and behavior requirements of the mission. The key components that were changed from the conceptual design of the autonomous recovery vehicle were the hull and the propulsion system.
For the hull, the RVP altered the flat-hull design to a catamaran shape. The catamaran hull shape allows the recovery vehicle to be more mobile as the double-hull structure cuts through the water better than a flat-hull, while maintaining the necessary wave pitch required to produce forward-thrust with the oscillating fin. To protect the oscillating fin and rudder from landing impact, the catamaran hull shape is adjusted to be more rounded to make the recovery vehicle to be self-righting, or resistant to capsizing, so the recovery vehicle can be landed on its side, shielding both the rudder and oscillating fin during landing impact. In this report, the principles of the oscillating fin are proven and test show that the oscillating fin generates enough thrust to overcome waves. Furthermore, the auxiliary propulsion from the conceptual design was removed to improve weight and reduce power consumption.
For the hull, the RVP altered the flat-hull design to a catamaran shape. The catamaran hull shape allows the recovery vehicle to be more mobile as the double-hull structure cuts through the water better than a flat-hull, while maintaining the necessary wave pitch required to produce forward-thrust with the oscillating fin. To protect the oscillating fin and rudder from landing impact, the catamaran hull shape is adjusted to be more rounded to make the recovery vehicle to be self-righting, or resistant to capsizing, so the recovery vehicle can be landed on its side, shielding both the rudder and oscillating fin during landing impact. In this report, the principles of the oscillating fin are proven and test show that the oscillating fin generates enough thrust to overcome waves. Furthermore, the auxiliary propulsion from the conceptual design was removed to improve weight and reduce power consumption.
Internal Configuration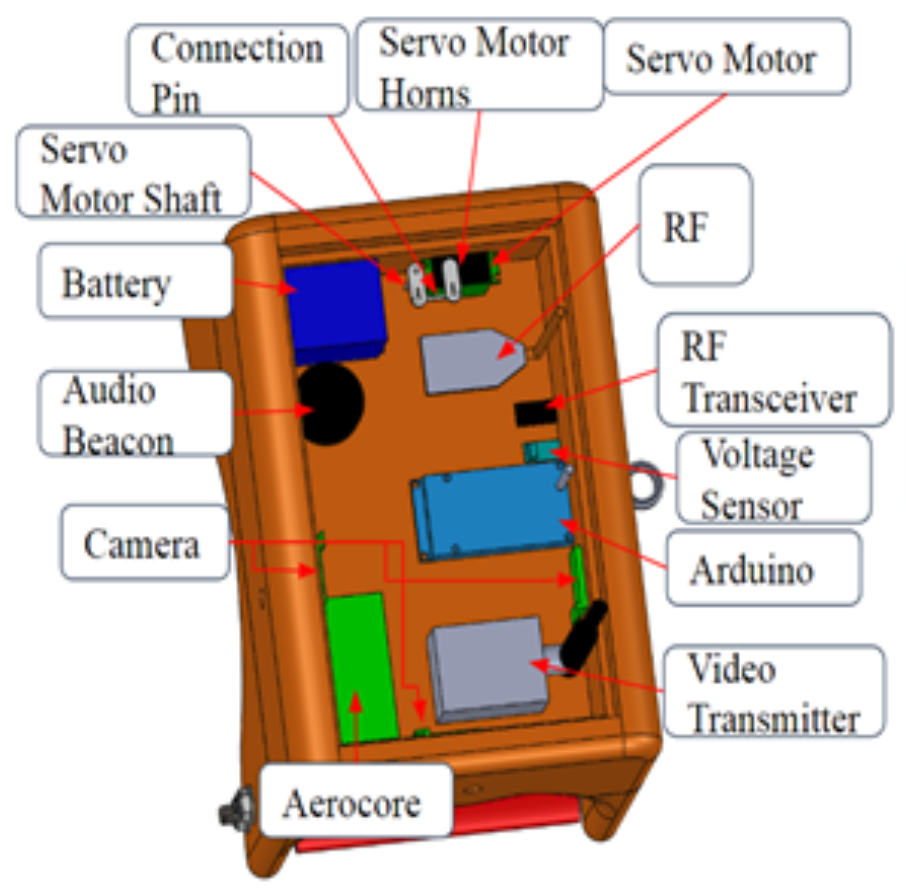
|
External Configuration
|
Read and learn more about UHABS-6 in our Design Reports below:
| UHABS-6 PDR Report |
| UHABS-6 CDR Report |
